Real-Time Spatial Information Acquisition and Use for Infrastructure Construction and Maintenance
Abstract
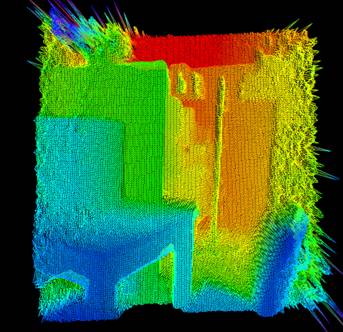
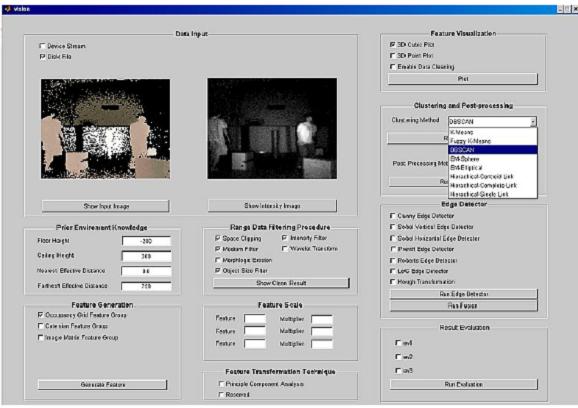
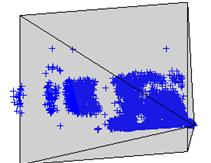
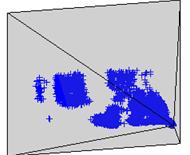
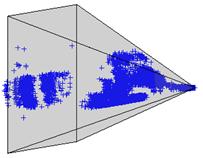
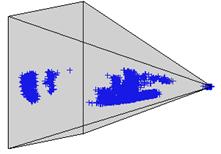
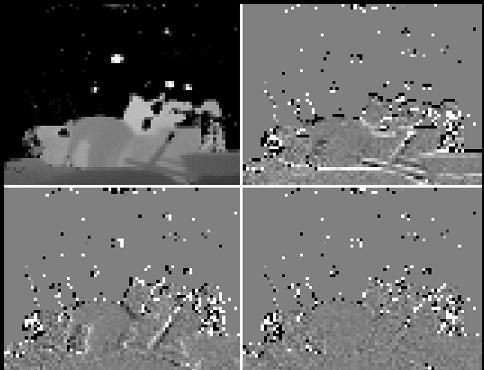
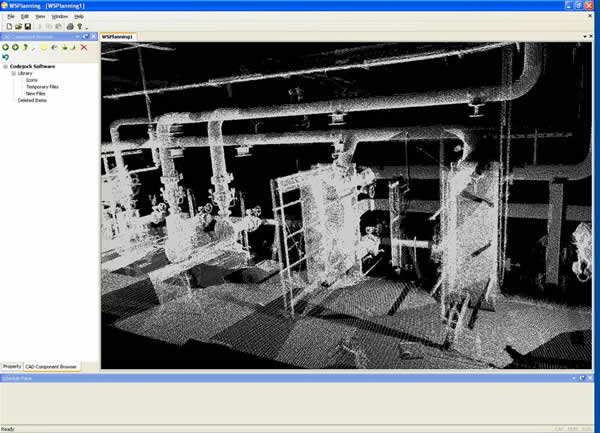
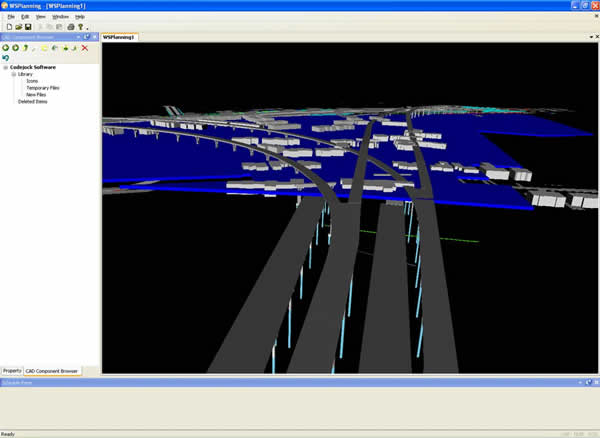
Current methods for spatial information acquisition and modeling rely on expensive laser range scanners that produce dense point clouds which require hours or days of post-processing to arrive at a finished model. While these methods produce very detailed 3D models of the scanned scene, the associated computational time burden precludes these methods from being used onsite for real-time decision-making. The research team started with their initial search for a potential sensing technology which could capture 3D scene with reasonable precision on the fly. An emerging technology, Flash LADAR, has been identified holding promise for this purpose. It uses a flash shot to acquire single or file sequences of a matrix of pixels where each pixel contains the intensity and range value of a work scene (see below pictures and video). The range images from Flash LADAR have low resolutions (60-120 voxels), however, high scanning frequency (30 Hz) is achievable. While rapid local area modeling using sparse point clouds is optimal for static site modeling, Flash LADAR may be used efficiently for detecting and modeling moving objects for real-time obstacle avoidance.
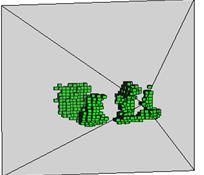
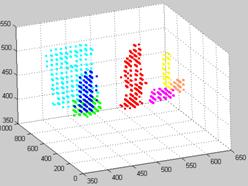
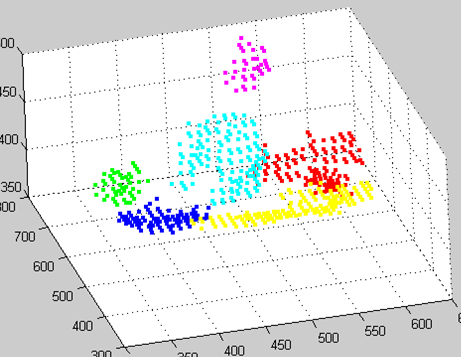
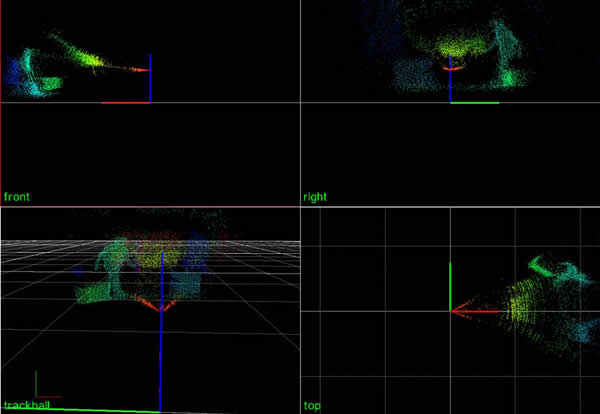
It is found through our investigation that rapid local area modeling, aided by high frequency laser scans, has great potential for improving construction site resource management. However, as a crucial component of the modeling process, the rapid processing of tens of thousands of scanning points within fractions of seconds is still a challenge requiring further investigation. This study aims to investigate the performance of various data processing algorithms for range points captured from laser scanners in both indoor and outdoor environments. An integrated range data processing module is developed in this study, allowing for quick experimentation with various combinations of data filtering, transformation, and segmentation approaches. The group of processing algorithms that were identified could robustly handle sensor noise and accurately process high frequency local area laser scans.